Bộ điều khiển PID là một trong những thuật toán điều khiển phổ biến và quan trọng nhất trong lĩnh vực tự động hóa công nghiệp. Với khả năng điều chỉnh linh hoạt và hiệu quả, PID được ứng dụng rộng rãi trong nhiều ngành công nghiệp và hệ thống khác nhau. Bài viết này A.I Tech sẽ cùng bạn tìm hiểu tổng quan về thiết bị này.

Bộ điều khiển PID là gì?
Bộ điều khiển PID (Proportional-Integral-Derivative) là một cơ chế điều khiển phổ biến trong các hệ thống điều khiển tự động hóa công nghiệp. Đây là một công cụ mạnh mẽ, được thiết kế để điều chỉnh các biến trong một quy trình sao cho hệ thống đạt được trạng thái ổn định và hiệu suất tối ưu. PID có thể được coi là trung tâm của hệ thống điều khiển, với khả năng phản hồi và điều chỉnh tín hiệu dựa trên sai số giữa giá trị mong muốn (setpoint) và giá trị đầu vào thực tế.
PID không phải là một phát minh mới. Thuật toán điều khiển này đã xuất hiện từ những năm 1922, khi Nicolas Minorsky một kỹ sư người Nga, lần đầu tiên phát triển các nguyên lý cơ bản của điều khiển tự động. Qua nhiều thập kỷ, PID đã chứng tỏ sự hữu dụng và vẫn duy trì vai trò quan trọng trong điều khiển tự động nhờ tính đơn giản và hiệu quả của nó.

Nguyên lý hoạt động của bộ điều khiển PID
Để dễ hình dung, hãy cùng A.I Tech xem qua một ví dụ: Tưởng tượng bạn đang lái xe: Mục tiêu của bạn là giữ tốc độ ổn định ở 60km/h. Bạn sẽ liên tục quan sát đồng hồ tốc độ (giá trị đo) và so sánh với tốc độ mong muốn (setpoint). Nếu xe chạy chậm hơn, bạn sẽ nhấn ga (tăng tín hiệu điều khiển). Ngược lại, nếu xe chạy quá nhanh, bạn sẽ nhả ga (giảm tín hiệu điều khiển).
Bộ điều khiển PID cũng sẽ hoạt động như vậy, nó sẽ tính toán một tín hiệu điều khiển thích hợp để đưa hệ thống về setpoint một cách nhanh chóng và ổn định.
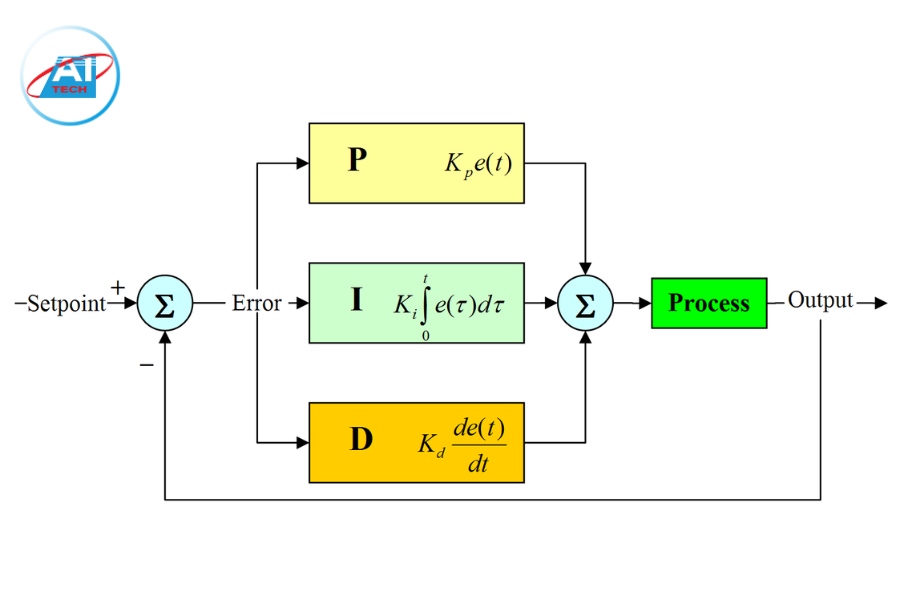
Bộ điều khiển PID hoạt động dựa trên 3 thành phần chính: Proportional (P), Integral (I), và Derivative (D). Mỗi thành phần này đóng một vai trò quan trọng trong việc điều chỉnh tín hiệu điều khiển để đưa hệ thống về trạng thái cân bằng.
- Proportional (P): Thành phần này dựa trên sai số hiện tại, nghĩa là sự khác biệt giữa giá trị thực tế và giá trị mong muốn. Giá trị P càng cao, phản ứng của hệ thống càng nhanh, nhưng cũng dễ dẫn đến hiện tượng dao động nếu không được điều chỉnh hợp lý.
- Integral (I): Thành phần I tính toán sai số tích lũy qua thời gian. Điều này giúp loại bỏ sai số tĩnh (steady-state error), đảm bảo rằng hệ thống không bị lệch khỏi setpoint sau khi quá trình ổn định.
- Derivative (D): D là vi phân của sai lệch, dựa trên tốc độ thay đổi của sai số, giúp dự đoán và ngăn chặn các dao động lớn, làm cho hệ thống trở nên ổn định hơn.
Có bao nhiêu bộ điều khiển PID?
Dựa vào cách thức hoạt động và các thành phần điều khiển, bộ điều khiển PID được chia thành 4 loại chính như sau:
- Bộ Điều Khiển P (Proportional Controller): Đây là loại điều khiển chỉ sử dụng thành phần tỷ lệ (P). Bộ điều khiển này điều chỉnh đầu ra tỷ lệ với sai số hiện tại, nghĩa là sự chênh lệch giữa giá trị mong muốn và giá trị đo được của hệ thống. Tuy nhiên, một hạn chế của bộ điều khiển P là nó không thể loại bỏ hoàn toàn sai số bù, hay còn gọi là sai số trạng thái ổn định.
- Bộ Điều Khiển PI (Proportional-Integral Controller): Bộ điều khiển này kết hợp cả hai thành phần tỷ lệ (P) và tích phân (I). Thành phần tích phân (I) giúp loại bỏ sai số trạng thái ổn định mà bộ điều khiển P không thể giải quyết. Đây là lựa chọn phổ biến trong nhiều ứng dụng khi không cần điều chỉnh nhanh, nhưng yêu cầu độ chính xác cao trong trạng thái ổn định.
- Bộ Điều Khiển PD (Proportional-Derivative Controller): Kết hợp giữa tỷ lệ (P) và đạo hàm (D). Thành phần đạo hàm (D) giúp dự đoán xu hướng của sai số, cho phép hệ thống phản ứng nhanh với các thay đổi đột ngột. Tuy nhiên, do không có thành phần tích phân (I), bộ điều khiển PD cũng không thể loại bỏ sai số trạng thái ổn định.
- Bộ Điều Khiển PID: Đây là loại điều khiển kết hợp cả ba thành phần tỷ lệ (P), tích phân (I), và đạo hàm (D). Bộ điều khiển PID cung cấp sự cân bằng giữa độ chính xác và tốc độ phản hồi, giúp hệ thống đạt được hiệu suất tối ưu trong nhiều tình huống khác nhau.

Một số ứng dụng của bộ điều khiển PID trong công nghiệp
Với khả năng điều chỉnh linh hoạt, PID được sử dụng rộng rãi để kiểm soát nhiều quá trình công nghiệp khác nhau. Dưới đây là một số ứng dụng phổ biến
-
- Điều khiển nhiệt độ: PID được sử dụng rộng rãi trong điều khiển nhiệt độ, đảm bảo các quá trình sản xuất diễn ra ổn định. Chẳng hạn, trong lò nung và lò hấp của ngành luyện kim hoặc thực phẩm, PID duy trì nhiệt độ ở mức mong muốn, đảm bảo chất lượng sản phẩm đồng đều. Ngoài ra, trong máy ép nhựa, PID giúp kiểm soát nhiệt độ chính xác, tạo ra các sản phẩm nhựa có chất lượng cao.
- ĐIều khiển áp suất, lưu lượng
- Trong các hệ thống đường ống dẫn truyền, PID kiểm soát lưu lượng và áp suất, đảm bảo hoạt động ổn định. Ví dụ, trong hệ thống cung cấp nước, PID duy trì áp suất nước ổn định ngay cả khi nhu cầu thay đổi.
- Điều khiển tốc độ động cơ: Giống với ví dụ xe máy và A.I Tech đã đề cập ở trên, thì PID cũng được sử dụng để điều chỉnh tốc độ động cơ trong nhiều ngành công nghiệp. Trong dây chuyền sản xuất, PID giữ cho băng tải và máy móc hoạt động với tốc độ ổn định, đảm bảo sản phẩm được sản xuất đồng đều.
Ngoài ra Bộ điều khiển này còn được tích hợp trong nhiều hệ thống khác như PLC, DSC, để tăng tính ứng dụng trong tự động hóa công nghiệp.

Hướng dẫn sử dụng bộ điều khiển PID hiệu quả
Dể cài đặt và sử dụng bộ điều khiển này đạt được hiệu suất cao nhất, bạn phải hiểu rõ về các thành phần của PID:
- Proportional (P): Thành phần tỉ lệ. Thành phần này điều chỉnh đầu ra dựa trên độ lệch giữa giá trị thực tế và giá trị mục tiêu. Tỉ lệ này thường được điều chỉnh bằng cách thay đổi hệ số Kp.
- Integral (I): Thành phần tích phân. Thành phần này tích lũy lỗi qua thời gian, giúp loại bỏ lỗi tồn tại lâu dài bằng cách điều chỉnh đầu ra để giảm thiểu sai lệch tích lũy. Hệ số này được điều chỉnh bằng cách thay đổi hệ số Ki.
- Derivative (D): Thành phần vi phân. Thành phần này dự đoán xu hướng của sai số bằng cách xem xét tốc độ thay đổi của nó, giúp hệ thống phản ứng nhanh hơn với sự thay đổi. Hệ số D được điều chỉnh bằng cách thay đổi hệ số Kd.
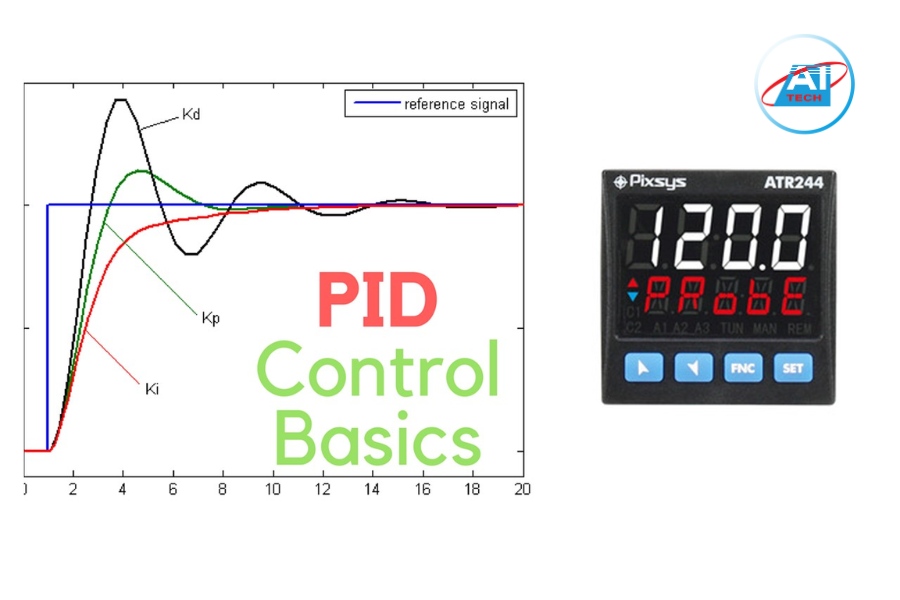
Sau đó bạn cần tinh chỉnh bộ điều khiển PID sao cho các giá trị Kp, Ki, và Kd đạt được hiệu suất tối ưu:
- Bước 1: Thiết lập ban đầu: Chọn giá trị khởi điểm cho Kp, Ki, và Kd. Thông thường, bắt đầu với Kp cao, Ki và Kd bằng 0.
- Bước 2: Quan sát và điều chỉnh: Quan sát phản hồi của hệ thống, nếu thấy hệ thống dao động quá nhiều, giảm Kp hoặc tăng Kd. Nếu có sai số kéo dài, tăng Ki.
- Bước 3: Tinh chỉnh lại: Tiếp tục điều chỉnh các tham số cho đến khi hệ thống đạt được sự độ ổn định và đáp ứng mục tiêu đặt ra mà không bị dao động quá mức.
Lời kết
Với những chia sẻ trên của A.I Tech chắc hẳn đã giúp bạn hiểu hơn về thiết bị này rồi phải không nào? Có thể thấy bộ điều khiển PID cho phép hỗ trợ điều chỉnh và ổn định các hệ thống tự động hóa phức tạp trong công nghiệp thông qua việc cân bằng ba thành phần P, I, và D. Đây chắc hẳn là một trong những thiết bị không thể thiếu nếu các doanh nghiệp muốn tối ưu hóa hệ thống sản xuất và dây truyền vận hành bên cạnh các hệ thống như PLC, DCS, SCADA.